LiTree_traduccion_paper
Observo la importancia en la vida de las personas a ser reconocidas, a ser vistas, a que se nos dé un par de palmaditas en la espalda. Esperamos una palabra de aliento, un apapacho o en la virtualidad el pulgar arriba, el corazón, la carita que ríe, etc. Requerimos mostrar lo que hacemos para encontrarle algún sentido.
Entonces, ¿Qué pasa cuando has estado haciendo algo que parece que no podría contribuir ni para bien ni para mal en nada? Bueno, pues de esto trata esta entrada. Últimamente he traído en la cabeza cómo poder aislar de forma individual cada árbol que se encuentra en una nube de puntos LiDAR. Quizás te parezca trivial, pero es que hay tantos caminos. Por ejemplo, probé utilizar el filtro litree de PDAL. Lo estudié un poco, y me troné la cabeza tratando de llegar a algún resultado. Hubo errores en la ventana de la terminal después de horas procesamiento, hasta que lo conseguí. La última de esas veces, luego de 24 horas conseguí la primera segmentación de árboles.
Poquito antes de conseguirlo, pregunté a una lista de correo de PDAL sobre un error:
Hello everyone: I have a question about the use of filters.litree. When I run:
$ pdal pipeline ./litree_prueba.jsonwhere de ./litree_prueba.json:
[
"./input.las"
{
"type":"filters.hag_delaunay"
},
{
"type":"filters.sort",
"dimension":"
"order":"DESC"
},
{
"type":"filters.litree",
"min_points":50,
"min_height":3.0,
"radius":50.0
},
{
"type":"writers.las",
"filename":"./output.as",
"minor_version":4,
"extra_dims":"all"
}
]I get de following output: “PDAL: All points collinear”
And the file “output.las” was never created.
Could you guide me on what I’m doing wrong, please?
Thank you
Ulises
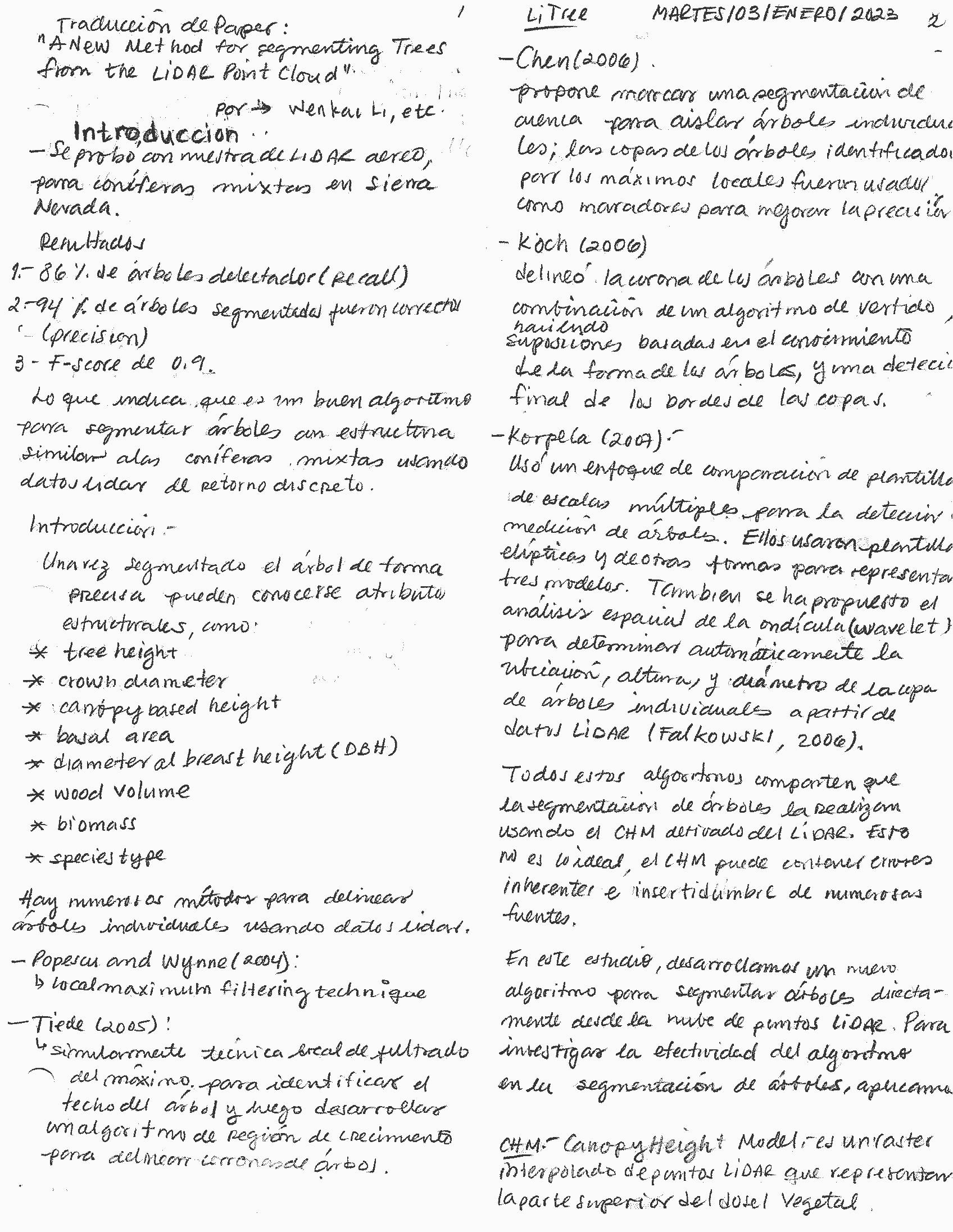
Me complació haber recibido respuesta de dos enormes personalidades de la geomática libre: Howard Butler y Jim Klassen. De esa respuesta me di cuenta que no estaba comprendiendo la dinámica del filtro litree, razón por la cuál me propuse estudiar con más detenimiento el algoritmo que utiliza dicho filtro. ¿Cómo? Pues traduciendo el paper que propone dicho algoritmo: “New Method for Segmenting Individual Trees from the Lidar Point Cloud”.
A propósito de esto último, caber resaltar que el inglés me cuesta bastante trabajo. Debo de confesar que últimamente descubro que en general no comprendo lo suficiente la estructura de la lengua española para entender las ideas. Entonces está peor el asunto de lo que yo pensaba.
Entonces, como decía, intentando practicar la comprensión de la lengua inglesa, me propuse traducir el mentando documento ayudado lo menos posible de un traductor (por ejemplo, google), usando papel y lápiz.
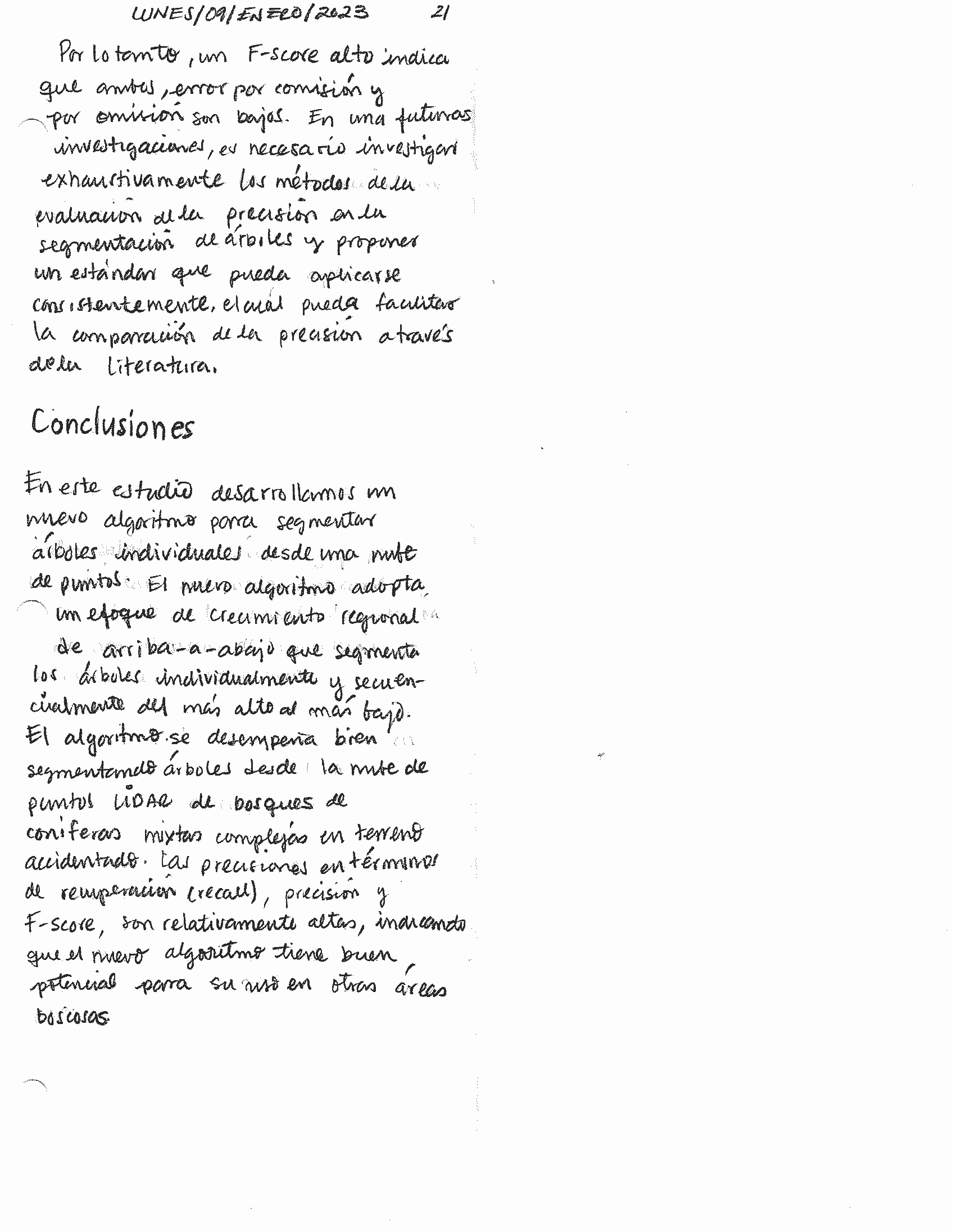
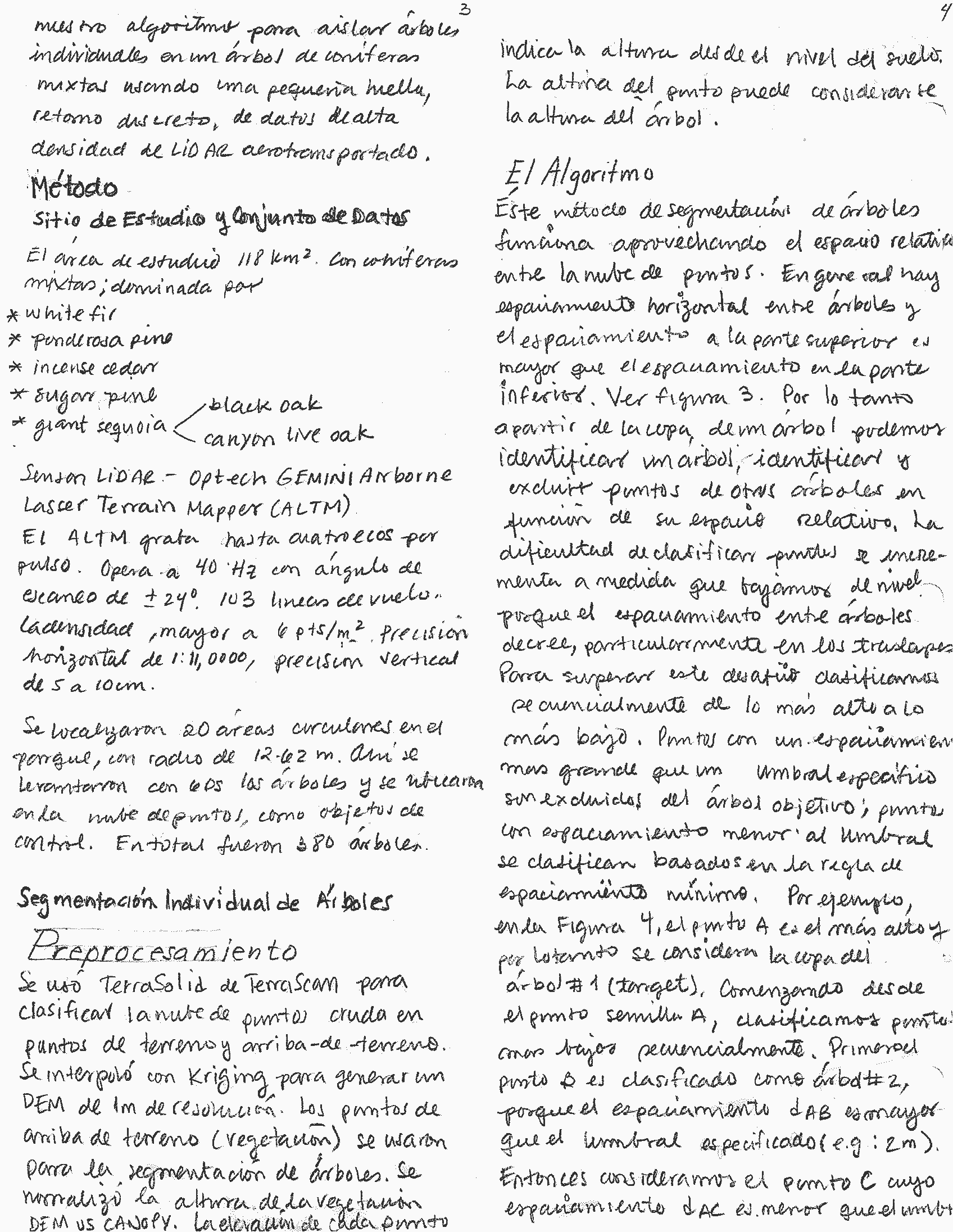
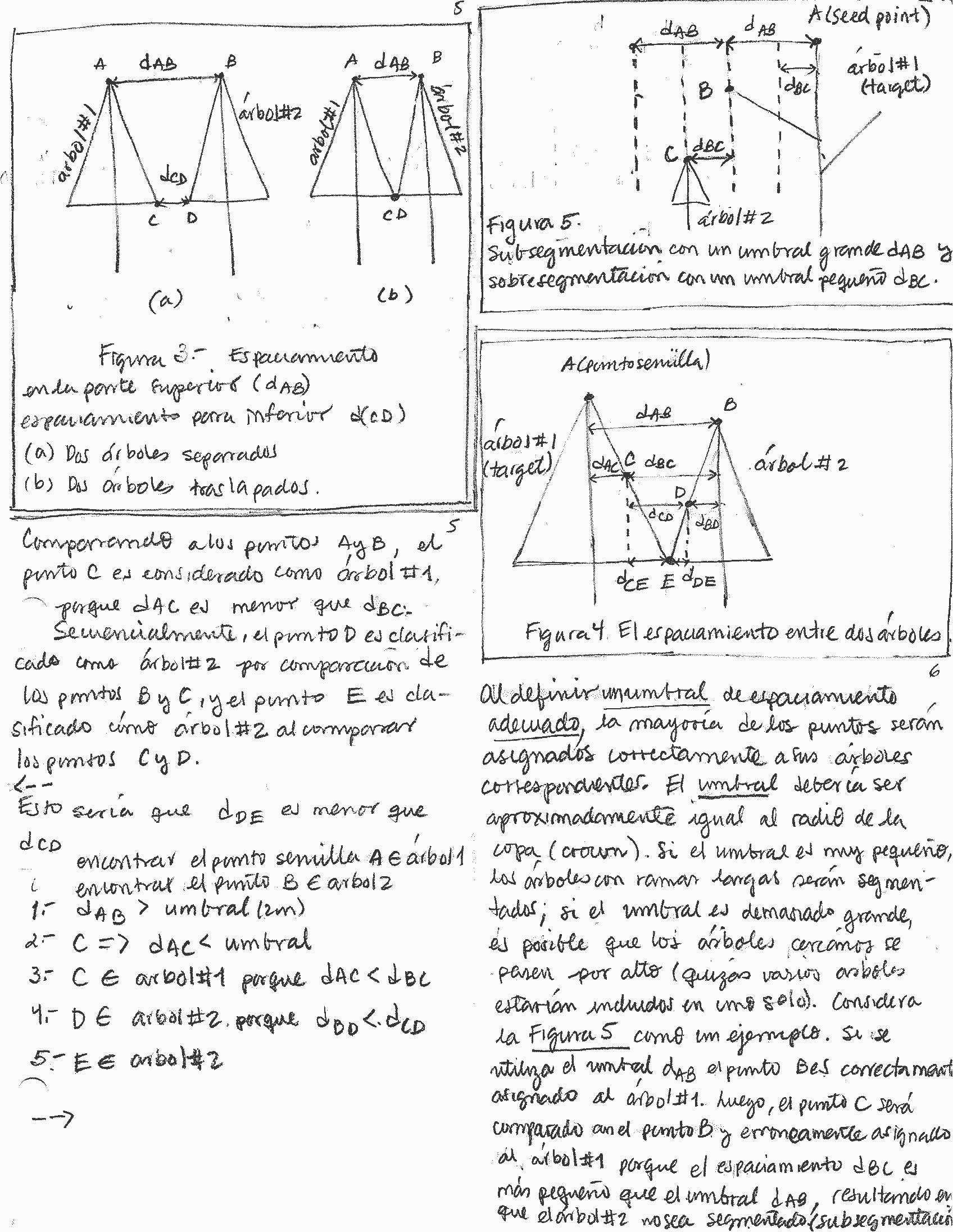
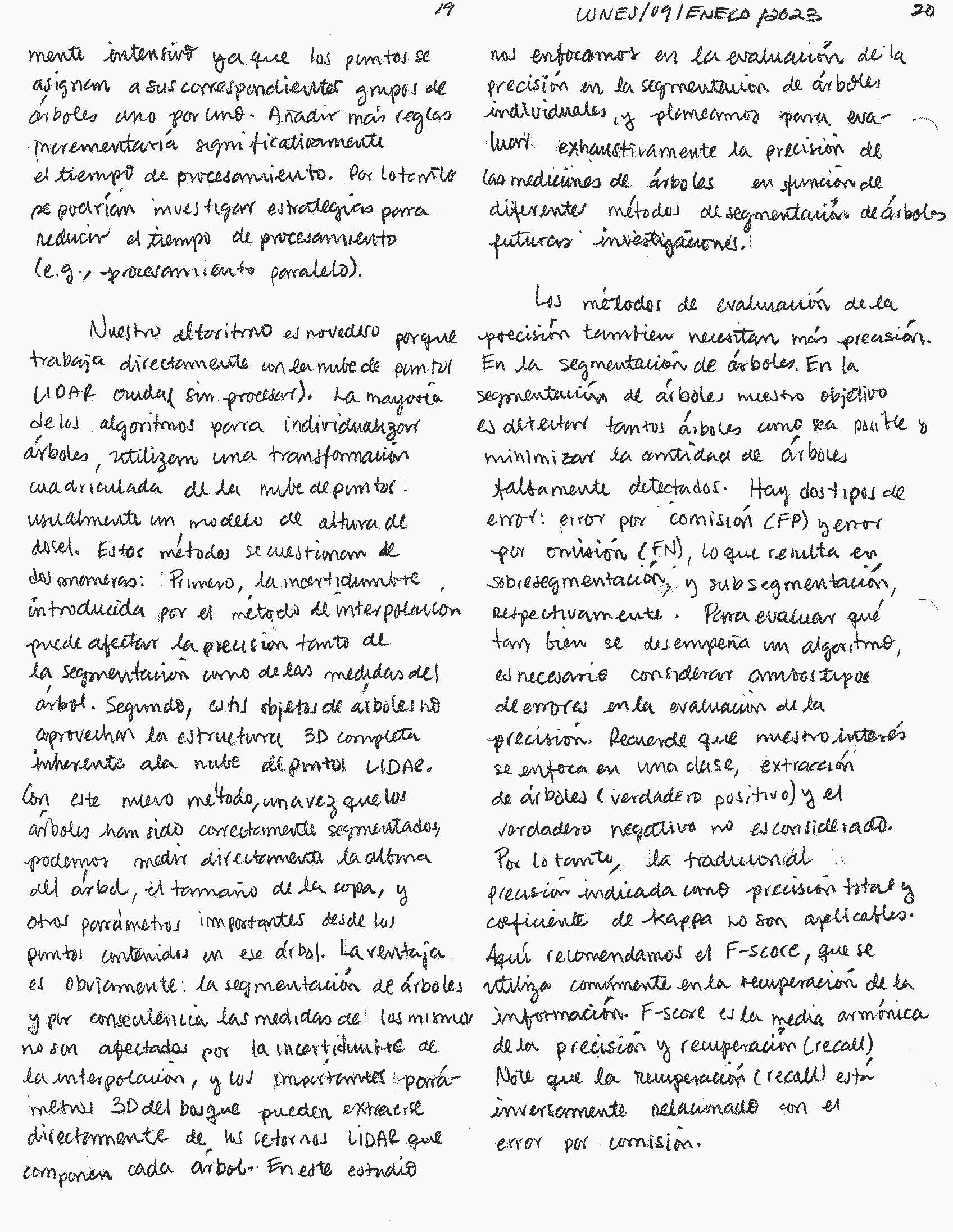
Este documento habla sobre un algoritmo para la segmentación de árboles de un bosque de coníferas mixtas, “retratado” y mostrado por una nube de puntos LiDAR que fue montado en un plataforma aérea.
Aquí pues dejo constancia de vida y tiempo invertidos en esta tarea.
Ulises
Nota: quisiera poner un visor de imágenes pero no tengo ni idea de cómo hacerlo… !aún!
Traduccion_LiTree-1.png
Traduccion_LiTree-2.png
Traduccion_LiTree-3.png
Traduccion_LiTree-4.png
Traduccion_LiTree-5.png
Traduccion_LiTree-6.png
Traduccion_LiTree-7.png
Traduccion_LiTree-8.png
Traduccion_LiTree-9.png
Traduccion_LiTree-10.png
Traduccion_LiTree-11.png
Traduccion_LiTree-12.png